Un team di ingegneri dell’Università del New South Wales ha creato un grabber, vale a dire un nuovo strumento robotico “mutaforma” per raccogliere oggetti attraverso una presa fine e precisa. Un arto robotico ispirato alla forma della proboscide di un elefante ma con il movimento di un serpente. Lo studio è stato pubblicato questo mese sulla rivista Advanced Materials Technologies, riportando le “firme” del progetto: il dottor Thanh Nho Do, direttore dell’UNSW Medical Robotics Lab, l’assistente Trung Thien Hoang, e il professor Nigel Lovell, coautore dello studio.
A differenza dei robot basati sugli artigli, questo robot con proboscide può avvolgere gli oggetti esercitando una presa decisamente migliore. E data la sua facilità di assemblaggio e la relativa economia dei materiali il grabber potrebbe essere disponibile in commercio in appena un anno.
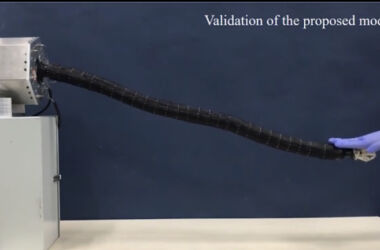
Vediamo il suo funzionamento in questo video
Il prototipo di robot proboscide che è stato utilizzato durante i test pesava solo 8,2 grammi e sollevava un oggetto di 1,8 chilogrammi (quasi 4 libbre), vale a dire più di 220 volte il suo peso.
Un robot proboscide come questo può diventare uno strumento stand alone, o addirittura essere applicato come plus agli attuali robot o strumenti oggi utilizzati per afferrare e trattenere oggetti meno flessibili, o capaci di applicare livelli di pressione inferiori.
“Il movimento di avvolgimento è reso possibile dal processo di produzione che coinvolge l’ingegneria computerizzata dell’abbigliamento e l’applicazione di sensori tattili a base di metallo liquido di nuova concezione e altamente sensibili per rilevare la forza di presa richiesta”, ha specificato il professor Nigel Lovell. L’arto dispone inoltre di un sensore di forza molto preciso. Gli consente di rilevare quanta presa è necessaria per evitare di rompere l’oggetto.
La capacità del robot proboscide di cambiare forma è considerata un ulteriore vantaggio, perché gli consente di entrare in piccoli spazi per raccogliere oggetti, come si vede nella dimostrazione con una matita in un tubo.