All’ETH, Politecnico federale di Zurigo considerato uno dei più importanti centri di ricerca del mondo, sono cauti e parlano ancora di fase di test; in attesa della configurazione finale per l’utilizzo nell’ambito di incidenti o disastri naturali (come strumento di ricerca). E’ l’androide StarlETH, che in questo bel video caricato dall’ente elvetico ci mostra le sue potenzialità
https://www.youtube.com/watch?v=9TEfeMIz6nA
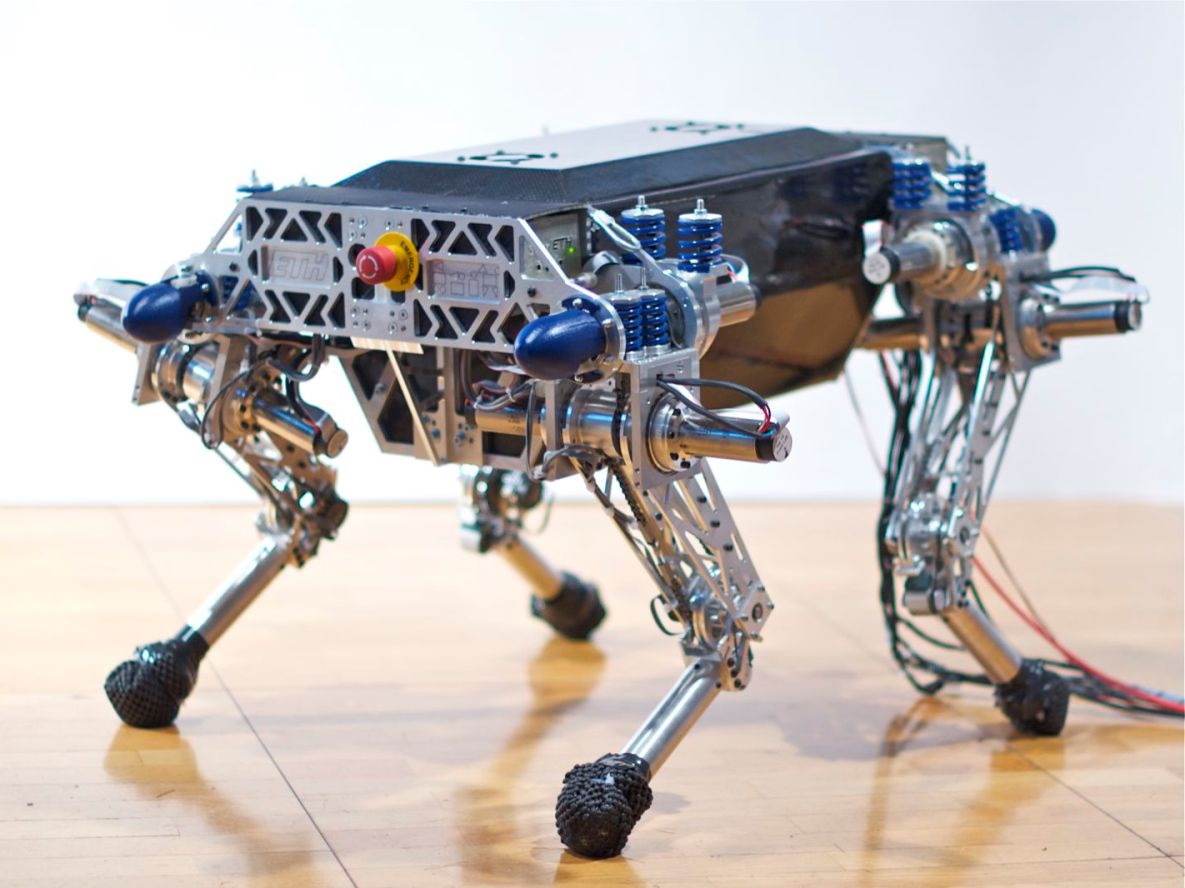
Dotato di 12 attuatori e numerosi sensori tra laser e telecamere, il robot è in grado di intuire e schivare ostacoli lungo il cammino; riesce a correre e a saltare, e perfino ad arrampicarsi, anticipando l’analisi e la tipologia della superficie sulla quale dovrà districarsi (anche cambiando direzione all’ultimo momento).
 Consumi energetici ridotti al minimo e comparazione con la corsa umana
Consumi energetici ridotti al minimo e comparazione con la corsa umana
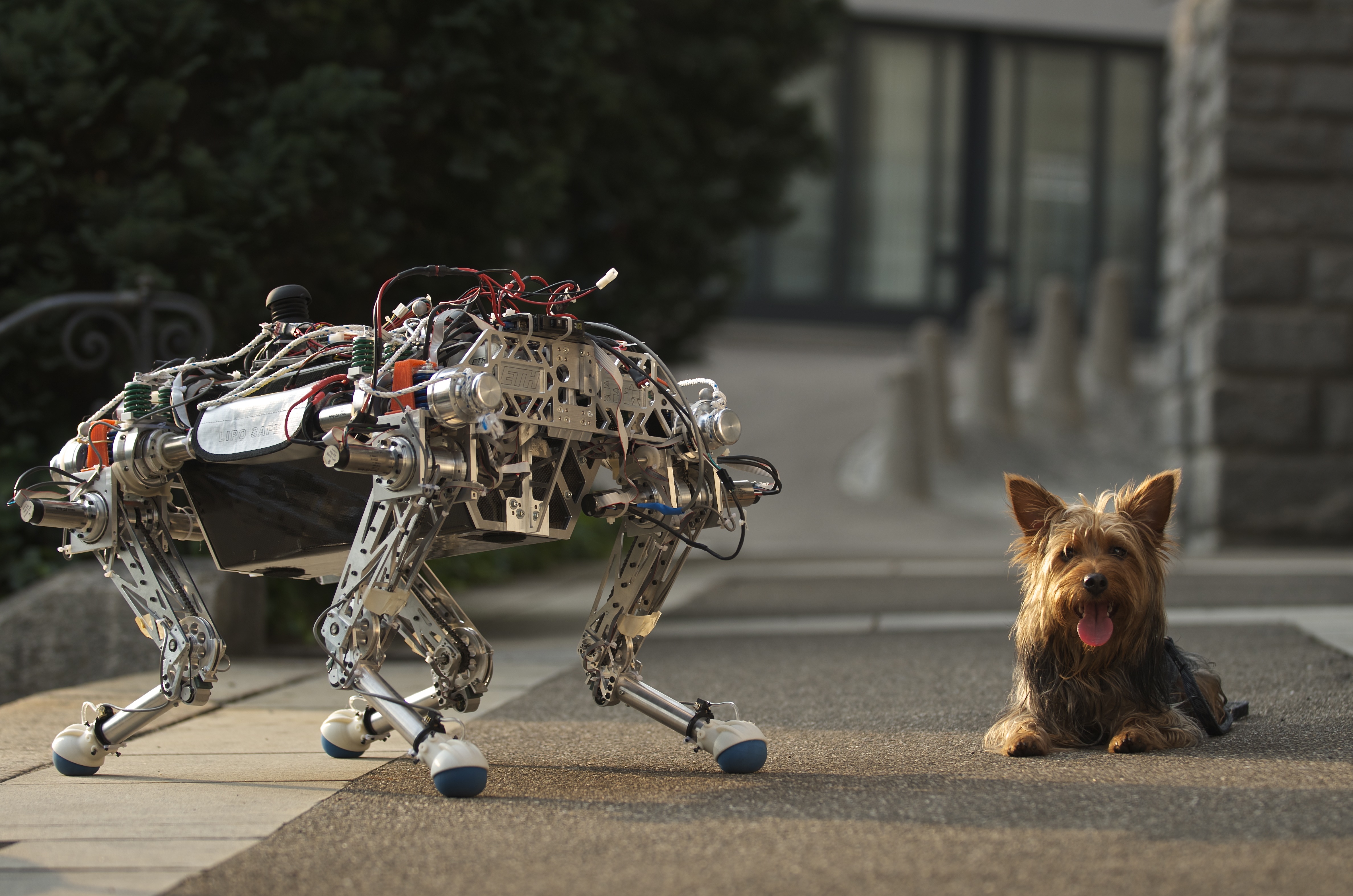
Il progetto di ETH progetto mira alla completa realizzazione di un quadrupede robotico, laddove le strategie di controllo e di funzionamento dovranno essere sviluppate in modo da massimizzare le prestazioni dinamiche riducendo al minimo il consumo energetico. Sfruttando le cognizioni acquisite, nelle dinamiche naturali, che hanno caratterizzato le ricerche legate ai robot bipedi.
Le parti principali del progetto possono essere così riassunte:
- Lo sviluppo di funzionalità di simulazione per aiutare calcoli di progetto e valutare le prestazioni dell’interfaccia controller;
- Progettazione, fabbricazione e collaudo di un prototipo meccanico per valutare la stabilità, la robustezza e le prestazioni del controller;
- Lo sviluppo di nuove strategie per l’alimentazione e l’energia, proseguendo nello studio del recupero fisico messo in atto dagli umani proprio durante una corsa (replicabilità negli androidi).