Come le categorie professionali che utilizzano in prevalenza le mani per svolgere il proprio lavoro (chirurghi, pianisti, dattilografe, cuochi, ecc.) nell’immediato futuro anche i robot potranno migliorare la loro esperienza, e essere aggiornati senza il bisogno di supporto umano.
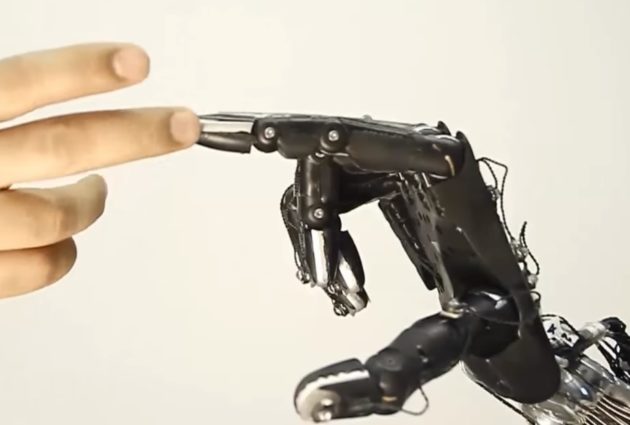
La manipolazione di oggetti a mano, ha spiegato uno dei ricercatori, è uno dei problemi più diffusi per i developers della robotica: “in prevalenza i robot hanno braccia molto grandi, mentre la mano ha le sole capacità di una ventosa o al limite di una pinza”.
Con il progetto AMP nasce una mano meccanica con un livello di abilità e forza mai raggiunto in precedenza. Il segreto però non risiede nell’hardware, bensì nel software, che analizza il feedback ricevuto da sensori e da micro-telecamere motion-capture. Questo feedback alimenti gli algoritmi, già preposti a attivare complessi comportamenti che riguardano le dita di una mano: digitare una tastiera, afferrare e utilizzare una pinza, o anche solo lanciare in aria un bastone per poi riafferrarlo a mezz’aria.
Il progetto verrà presentato a maggio nel corso dell’International Conference on Robotics and Automation (ICRA) che si terrrà a Stoccolma.