E arrivò il momento del silicone, per un ulteriore step nella ricerca robotica. La novità è stata introdotta dagli esperti del Computer Science and Artificial Intelligence Laboratory del MIT durante la recente International Conference on Intelligent Robots and Systems tenutasi nei giorni scorsi in Amburgo.
Il silicone è stato indicato dai ricercatori come un elemento morbido, dunque un inedito o quasi nel settore della robotica, in genere connotato da altri tipi di materiali più resistenti.
Ha dichiarato all’evento tedesco Daniela Rus, direttrice del laboratorio CSAIL dell’MIT: “Gli androidi sono in genere limitati nella loro operatività avendo problemi ad approcciare oggetti di forme e materiali molto diverse. Potere sentire un tatto sicuro con gli oggetti, con presa decisa, è uno step di grande importanza per metterli in grado di collaborare con gli uomini. Da qui l’esigenza di configurare degli arti ‘morbidi’ e agili attraverso un sistema di monitoraggio ben definito”.
 La svolta del silicone per processi più agili e prese di materiali tradizionalmente “ostici”
La svolta del silicone per processi più agili e prese di materiali tradizionalmente “ostici”

Le “mani” tradizionali che vengono utilizzate nella robotica possono rappresentare un problema perché alzano in modo esasperato l’asticella di una operatività che dovrà essere perfetta al cento per cento. “Un robot con arti superiori rigidi – prosegue Rus – conoscerà molti ostacoli, perché diventa necessario investire molto tempo per pianificare precisamente in che modo effettuare la procedura necessaria ad afferrare l’oggetto“.
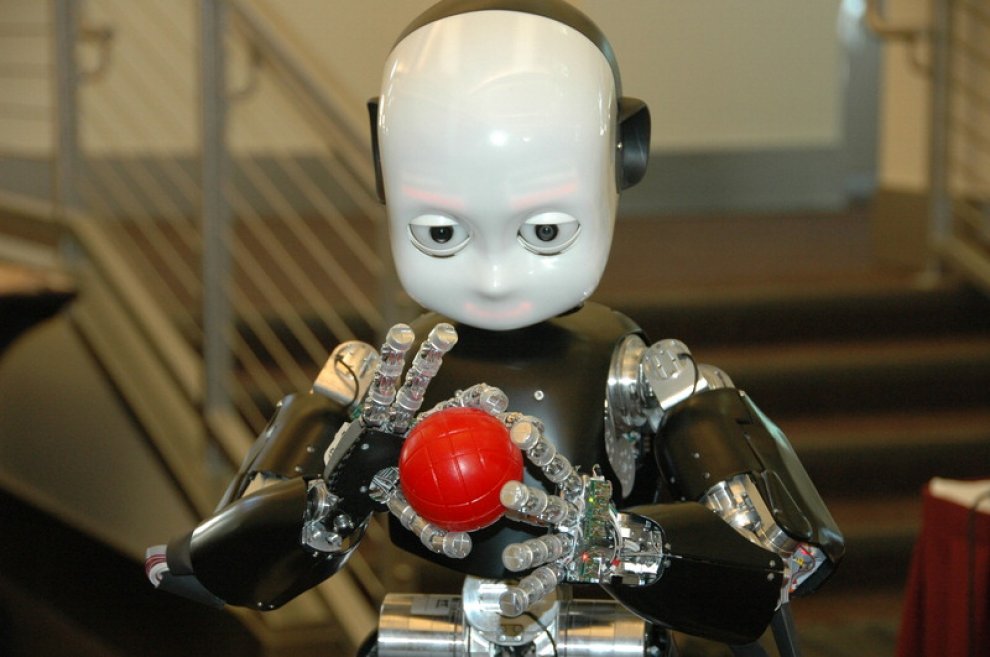
I robot configurati con il silicone richiedono minor precisione per afferrare e utilizzare efficacemente gli oggetti. D’altro canto va detto che è più complesso creare software e sensori che permettano a questo tipo di androide di misurare forma e posizione degli oggetti che deve afferrare. Ma per risolvere il problema, gli esperti del MIT hanno dotato il loro arto con dei sensori che controllano la posizione di ciascuna delle tre dita di cui il prototipo è munito, e hanno configurato un software che permette all’androide di riconoscere gli oggetti che deve “impugnare”: così dotata, la mano al silicone è risultata capace di prese di oggetti assai ostici per un device robotico.
Parliamo di blocchi di carta, CD musicali, ma anche di lattine di bevande che in genere vengono schiacciate dagli arti rigidi degli androidi.