Immaginate di disegnare al computer il vostro robot e poi di fare diventare realtà questo progetto. Tutto da soli. È quanto promette di fare un software progettato da un team di ricerca del Politecnico di Zurigo (Eth) in collaborazione con il centro di ricerca Disney di Zurigo e la Carnegie Mellon University di Pittsburgh, in Pennsylvania (Stati Uniti).
In pratica, una fabbrica virtuale che però consente di realizzare progetti reali, anzi sogni, perché il software è stato pensato per essere utilizzato da tutti, anche ai profani della materia, senza alcuna conoscenza specifica di robotica, ingegneria e meccanica: basta disegnare il robot nel modo desiderato, stampare i vari componenti con una stampante 3D e poi assemblarli applicando i motori e le articolazioni per costruire. E il gioco è fatto. Artefice di tutto ciò è l’italiano Vittorio Megaro, ricercatore presso l’Eth, che lo ha messo a punto per la sua tesi di dottorato. Nel video sotto si può vedere come il software lavora.
Come funziona
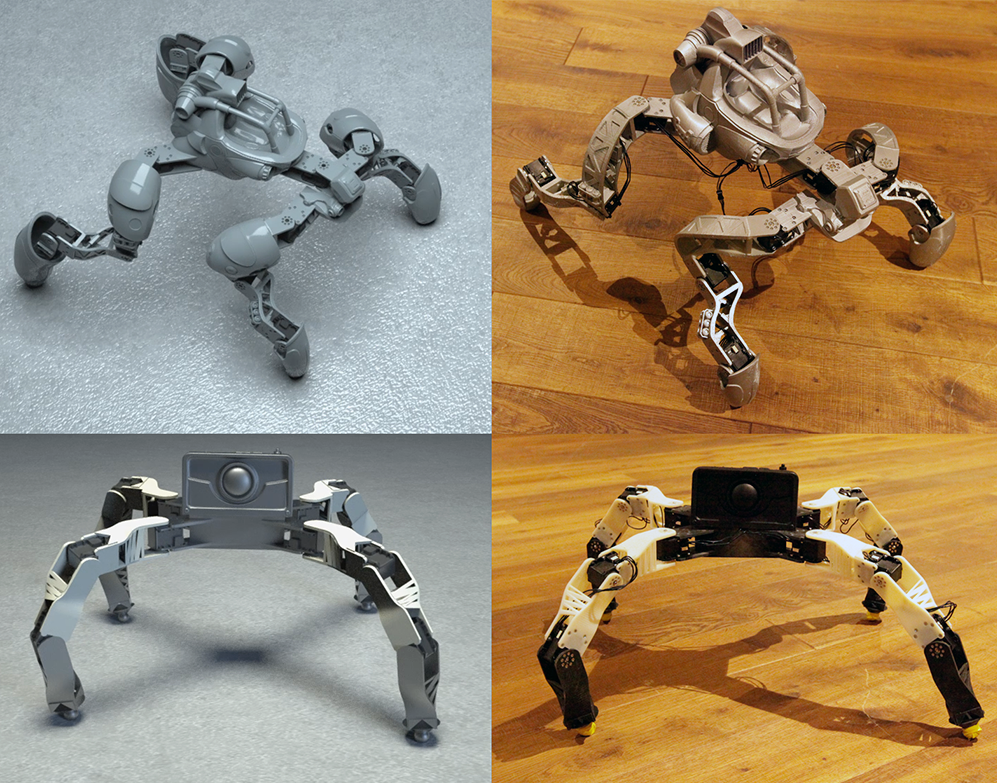
Si parte dallo scheletro base, specificando il numero di estremità e dei segmenti delle articolazioni mobili, aspetti che possono essere modificati a piacimento. A questo punto, si scelgono e progettano i movimenti, ad esempio decidendo che il robot si muoverà in avanti, di lato. E qui sta la grande innovazione: il software converte automaticamente tali scelte in segnali di controllo per i motori, in modo da garantire che il moto sia sempre stabile. Ma non solo. Ogni volta che si modifica la struttura del robot o gli obiettivi del movimento, il computer adatta automaticamente i nuovi valori, grazie a un processo di simulazione che consente all’utente di ricevere un feedback immediato sul moto risultante.
In tal modo la progettazione del robot viene enormemente semplificata: al “progettista” sembrerà di utilizzare una applicazione per le animazioni digitali, molto lontana dalla complessità di un normale programma di modellizzazione. Eppure, è proprio questo che il software fa.
All’insegna della semplificazione
Una volta soddisfatti del risultato raggiunto, il programma genera automaticamente le planimetrie tridimensionali per tutti i segmenti del corpo, i circuiti, i collegamenti che ospitano i motori elettrici. Nel programma sono memorizzati i formati standard di vari motori disponibili in commercio, quindi l’utente deve selezionare quello che fa al suo progetto per ottenere i dettagli dei collegamenti. A questo punto, si stampano i componenti con una stampante 3D per procedere infine al loro assemblaggio a mano.
Le creature robotiche che si possono realizzare con questo sistema sono piuttosto semplici: possono effettuare solo la gamma di movimenti creati in fase di progettazione, non sono equipaggiati con tutta la sensoristica che consente loro di evitare ostacoli o di muoversi in modo indipendente e non possono essere controllati a distanza. Tuttavia, il programma messo a punto da Megaro introduce un’importante semplificazione nel settore, che permetterà a chiunque, quando il software sarà lanciato sul mercato (i progettisti puntano a miglioralo ulteriormente), di realizzare un robot in base alle sue idee e con le più differenti morfologie.