Il primo brevetto di robot flessibile è stato ideato in Italia dal gruppo di ricerca del Centro di MicroBioRobotica di Pontedera (Pisa) in collaborazione con l’Istituto di BioRobotica della Scuola Superiore Sant’Anna e con l’Istituto Italiano di Tecnologia. La tecnica, pensata in particolare per l’ambito chirurgico, consente alla sottile forma robotica di costruirsi una guida in autonomia, nel suo percorso, senza bisogno di usare supporti esterni.
La sua forma ricorda quella di un serpente: le due strutture “intrecciate” che lo caratterizzano permettono allo “scrutatore” di allungarsi e curvarsi. Evitando con precisione ogni ostacolo. In ambito chirurgico rappresenta una grande innovazione potendo muoversi all’interno del corpo umano per raggiungere un obiettivo preciso in modalità non invasiva per il paziente.
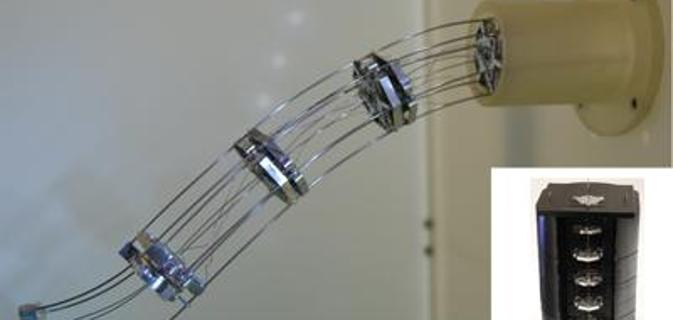
La forma flessibile viene stabilizzata, a seconda delle esigenze, tramite una coppia di fili elettrici che portano corrente a piccoli blocchi di materiale speciale che si dilata se percorso da elettricità.
Il prototipo sviluppato garantisce performance superiori a quelli oggi disponibili nel panoramica della chirurgia robotica. Nei prossimi anni potrebbero essere immessi sul mercato i primi modelli sviluppati per applicazioni specifiche. Un altro ambito di utilizzo, oltre a quello chirurgico, potrebbe essere quello aerospaziale. Sempre per far valere le features di massima flessibilità al servizio degli astronauti impegnati nelle missioni.