I robot dotati di 6 zampe possono camminare più velocemente rispetto agli insetti se appoggiano al suolo solo due arti alla volta, invece di tre. La scoperta è stata fatta dai ricercatori del Politecnico di Losanna che, in collaborazione con quelli dell’Università (Unil) della stessa città Svizzera, hanno condotto uno studio per appurare se davvero l’andatura tripode degli insetti sia la più veloce o se esistano opzioni più efficienti da trasferire nel mondo della robotica.
L’andatura dei robot a sei zampe, infatti, imita quella degli insetti, i quali si muovono tenendo sempre tre zampe sul terreno, due su un lato del corpo e uno sull’altro.
Un sistema efficiente che garantisce equilibrio e la possibilità di muoversi in modo veloce, e pertanto diventato il paradigma di riferimento per i progettisti di robot.
Lo studio condotto dai ricercatori svizzeri, i cui risultati sono stati pubblicati sulla rivista Nature Communications, ha però rivelato che esiste una modalità più veloce per muoversi su sei zampe in piano, una modalità che non esiste in natura e che consiste nel poggiare sul terreno solo due zampe.
Il modello: il moscerino della frutta
Per arrivare a questa conclusione gli scienziati hanno condotto una serie di studi ed esperimenti, articolati in tre fasi. Nella prima hanno simulato al computer i movimenti Drosophila melanogaster, il moscerino della frutta, l’insetto più studiato in biologia: attraverso uno speciale algoritmo, che mima l’evoluzione naturale, hanno poi valutato diversi tipi di andatura, scoprendo che la camminata che poggia due zampe alla volta è quella che permette di avere la più alta velocità di movimento in piano.
I ricercatori hanno anche scoperto che l’andatura tripode si è sviluppata negli insetti quando questi hanno cominciato a scalare le superfici verticali, dotandosi anche di soluzioni che permettano alle loro zampe di aderire alla superficie. Non a caso, proprio l’andatura tripode è risultata la più efficace per i movimenti in verticale, in quanto garantisce all’animale una maggiore stabilità.
Dal modello al robot
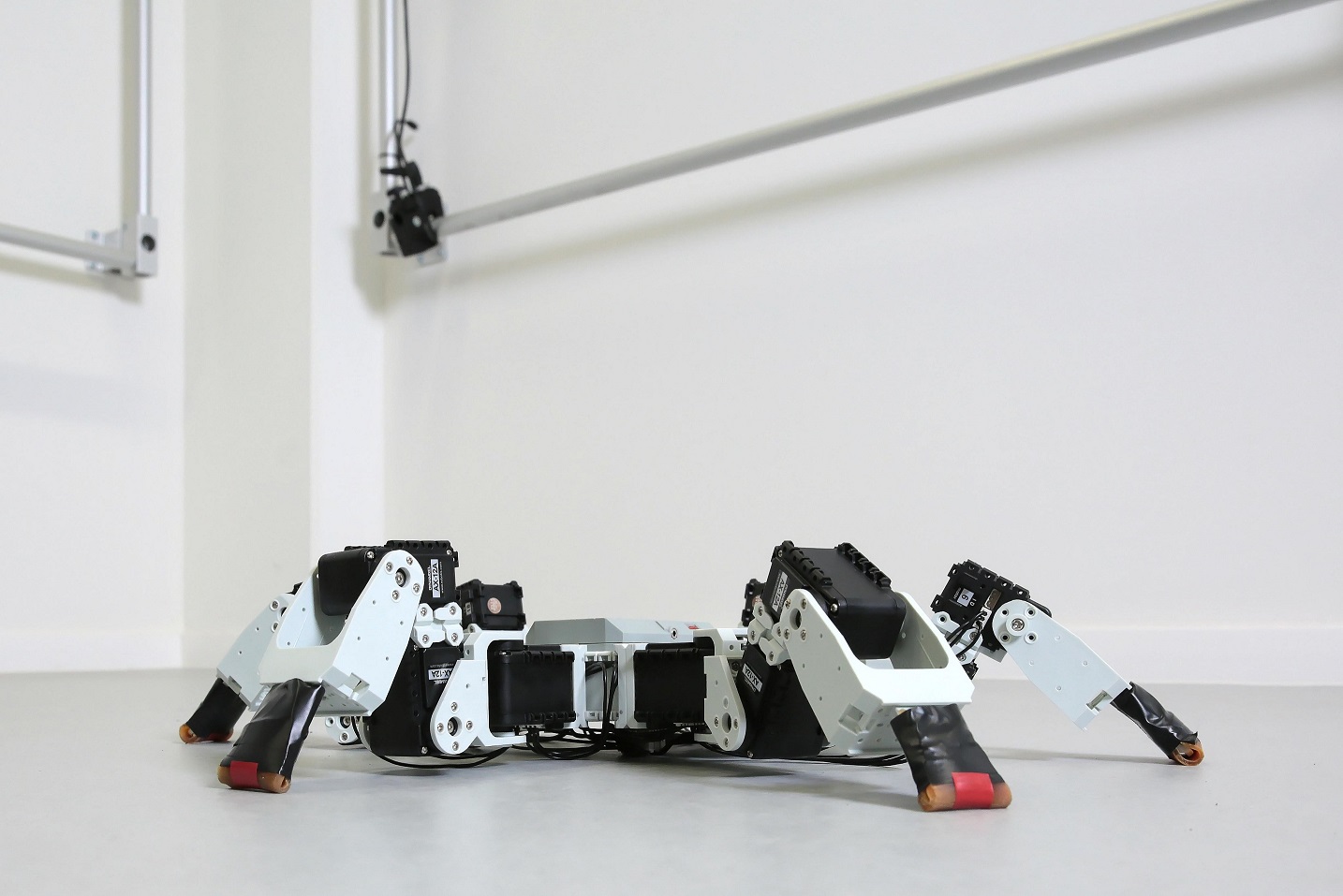
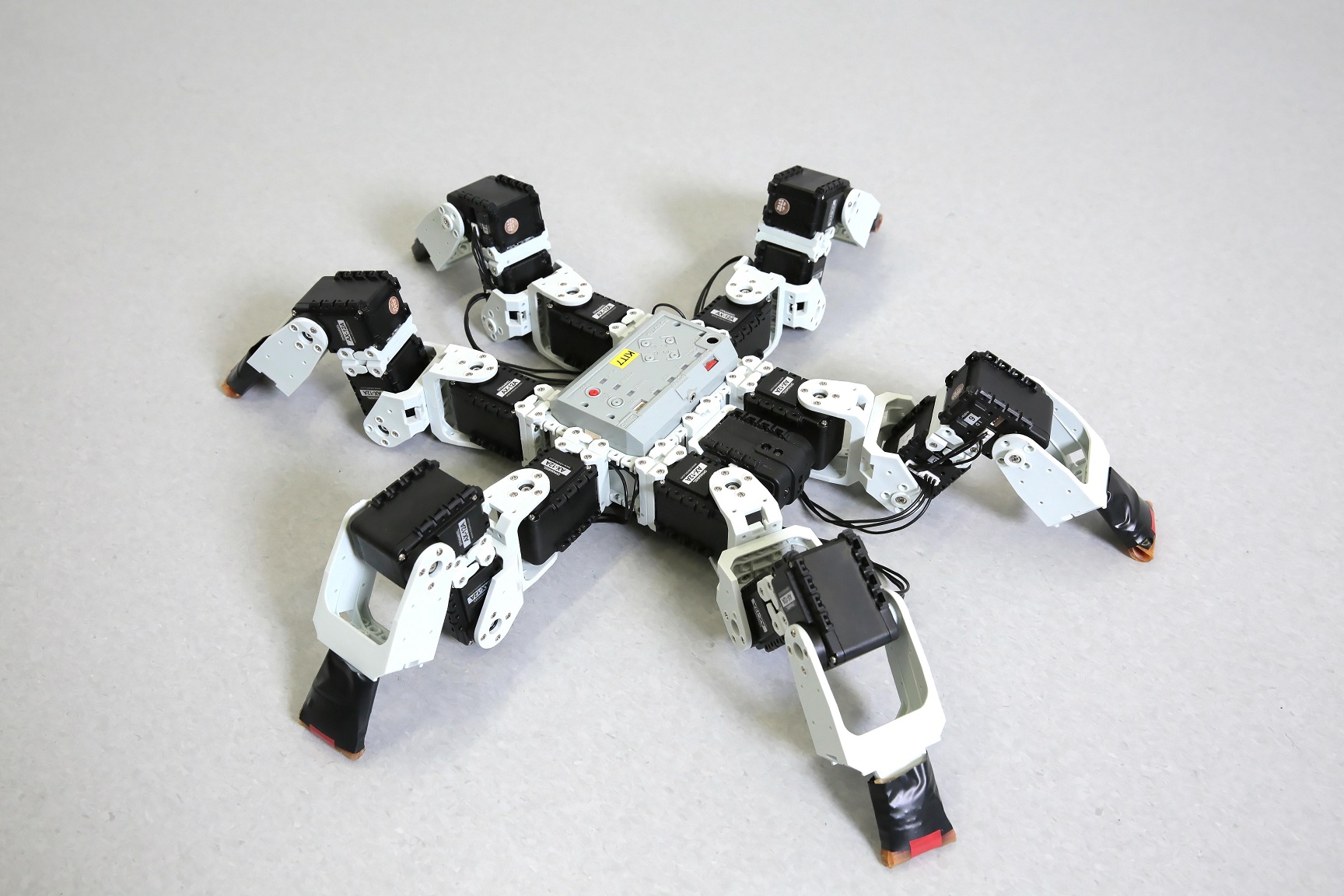
Nella seconda fase hanno portato il modello nella realtà, costruendo un robot a sei zampe in grado di utilizzare sia il movimento tripode sia quello bipede: anche in questo caso, quest’ultima andatura ha dimostrato di essere la più veloce, confermando i risultati degli algoritmi di simulazione.
Infine, hanno cercato la controprova ai risultati fin qui ottenuti esaminato il movimento degli insetti reali. Per farlo hanno cosparso le zampe di mosche e moscerini con delle gocce di polimero: perdendo la loro capacità adesiva, gli insetti hanno cominciato a camminare in maniera innaturale, appoggiando due zampe alla volta invece che tre. La prova ultima che questo tipo di andatura sia la più vantaggiosa per muoversi in piano.
Una scoperta che può aprire nuove strade alla locomozione robotica e che dimostra ancora una volta, se ce ne fosse bisogno, del proficuo e promettente dialogo che c’è tra tecnologia robotica e biologia e come questo possa offrire fondamentali contributi all’avanzamento delle conoscenze nelle due discipline.