Costruire una mano robotica come quella dell’ultima incarnazione di Luke Skywalker in Star Wars? Andando dunque oltre la “semplice” (si fa per dire) configurazione di pinza meccanica che afferra oggetti? E’ una sfida che vede impegnate diverse eccellenze nel mondo (anche italiane) e che pochi giorni fa ha vissuto un sussulto grazie a una nuova tecnologia approntata da due ricercatori universitari: Joseph Zhe Xu dell’ateneo di Yale e Emanuel Todorov della Washington University.
Ecco in un video realizzato dai due l’innovativo progetto di arto robotico antropomorfo, vale a dire con un elevato numero dei “gradi di libertà” (per raggio dei movimenti), ispirato ai prototipi utilizzati in ambito industriale per lavorazioni molto accurate
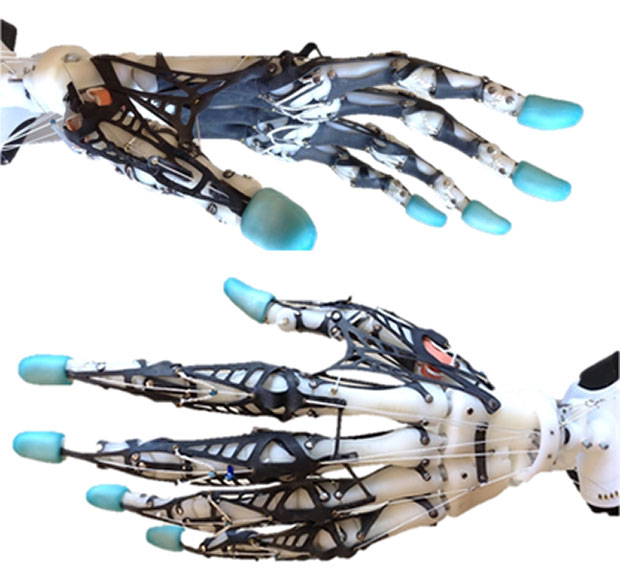
L’arto mima la struttura naturale di una mano umana. Le sue ossa artificiali sono state stampate in 3D da una scansione laser di un reale scheletro dell’arto. I legamenti nascono da combinazioni di stringhe meccaniche, mentre strati di gomma tagliata agiscono da tessuti molli per la stabilità e la flessibilità. Il tutto controllato da una struttura di servomeccanismi e cavi.
Uno sguardo sull’automazione del futuro per “prese” sempre più accurate
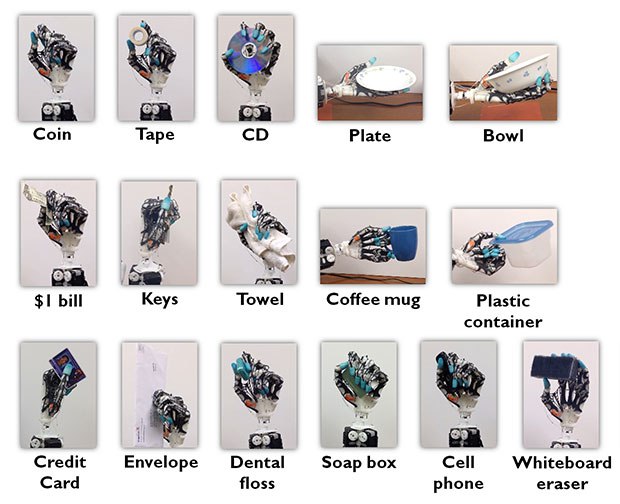
Gestito da remoto da una persona che indossa un guanto con sensori, l’arto di Xu e Todorov raggiunge le stesse performance di una mano nell’impugnare e manipolare gli oggetti di uso quotidiano: piatti, ciotole, monete, banconote, e perfino il filo interdentale.
I due ricercatori ritengono che la corrispondenza tra i movimenti dell’arto e quelli della mano umano è tale, che non è necessario un feedback: l’operatore da remoto dunque non dovrà neppure registrare la forza propulsiva mentre viene afferrato un oggetto.
Se equipaggiare di arto robotico chi è rimasto vittima di incidenti o di anomalie genetiche oggi rappresenta impegno percorribile in tante parti del mondo, lo sguardo di Xu e Todorov investe la crescita dell’integrazione robotica nelle industrie, dove oggi è ancora considerato sufficiente il livello standard di gestione e manipolazione delle componenti da parte di braccia meccaniche. Ma la prossima generazione di robot, in parallelo con lo sviluppo di nuove forme di automazione, dovrà rasentare la perfezione che il nuovo arto garantisce per operazioni che saranno sempre più dettagliate e richiedenti meticolosità (come per esempio la gestione dei circuiti di imballaggio delle scatole).