Clicca qui per vedere un recente video realizzato da Rethink
“Parte del nostro lavoro consiste nell’inventare il futuro“, ha recentemente affermato durante un evento pubblico Mary Bernardine Dias, docente del Robotics Institute della Carnegie Mellon University. “Noi immaginiamo i robot come parte della società nelle smart cities e vogliamo assicurarci che un deficit visivo ed altre disabilità non restino tagliate fuori da quel futuro”. Dias e il suo collaboratore Aaron Steinfeld stanno adoperandosi per scoprire i metodi più efficienti in cui un robot Baxter può interagire con persone affette da deficit visivi o cecità totale. La ricerca è finanziata dal National Science Foundation.
 Il segreto di Baxter? Trasmettere sicurezza ai non vedenti
Il segreto di Baxter? Trasmettere sicurezza ai non vedenti

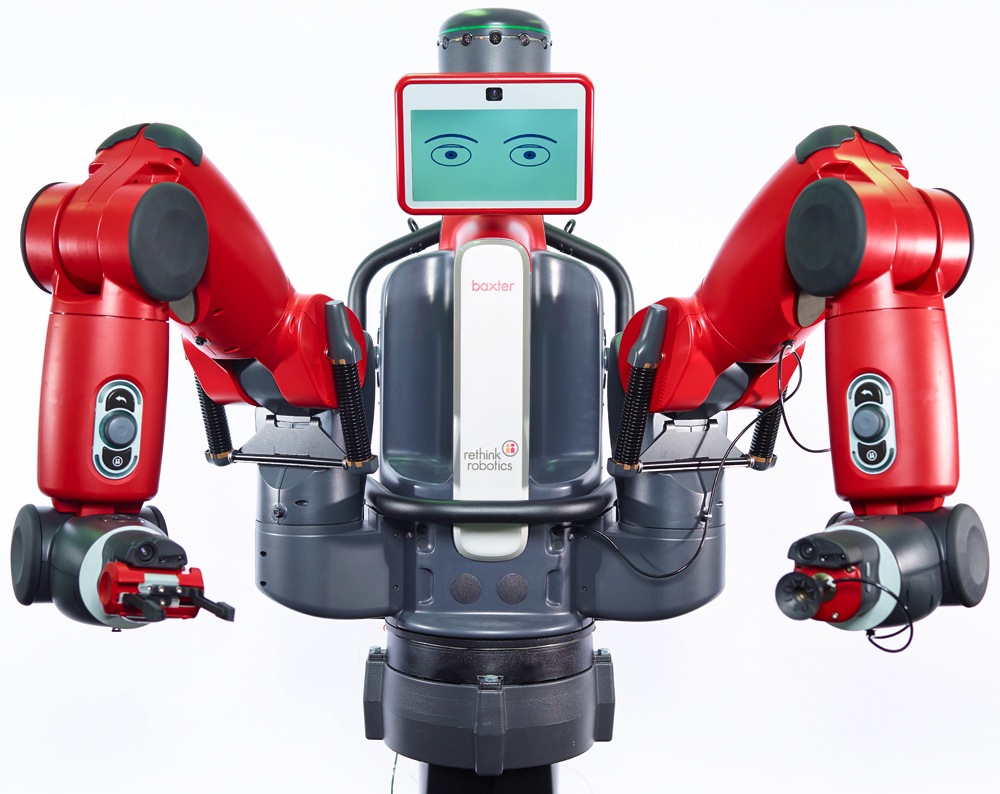
Grazie a confronti con i membri della comunità di non vedenti di Pittsburgh, Dias e Steinfeld hanno ideato e realizzato il concetto di un robot assistente presso un banco informazioni in un frenetico centro di transito. L’esperimento ha riservato qualche sorpresa. “La prima volta, le persone dotate di vista tendono ad essere preoccupate per la presenza di un robot“, ha spiegato Steinfeld. “Le persone cieche, al contrario, sono più propense a interagire con un robot. Hanno dimostrato una maggiore sicurezza nel tenere le dita di plastica del robot che ad avere un contatto fisico con un altro essere umano”.
Uno degli elementi fondamentali per cui Dias e Steinfeld hanno scelto il Baxter è per il senso di sicurezza che trasmette alle persone che interagiscono con il senso del tatto. Il robot comincia con il presentare se stesso, e in seguito si spegne per permettere alle persone di esplorare manualmente la sua forma e struttura. Una volta terminata questa sessione, un comando vocale riaccende il robot.
Dias e Steinfeld vogliono integrare un’app di navigazione per smartphone all’interno del robot Baxter. L’app è già pronta, si chiama NavPal e include segnali acustici coi quali avvertire gli utenti ciechi di pericoli quali tombini o cantieri. Nel lungo termine, i ricercatori sperano di presentare robot mobili in grado di guidare fisicamente le persone come i cani guida di oggi.