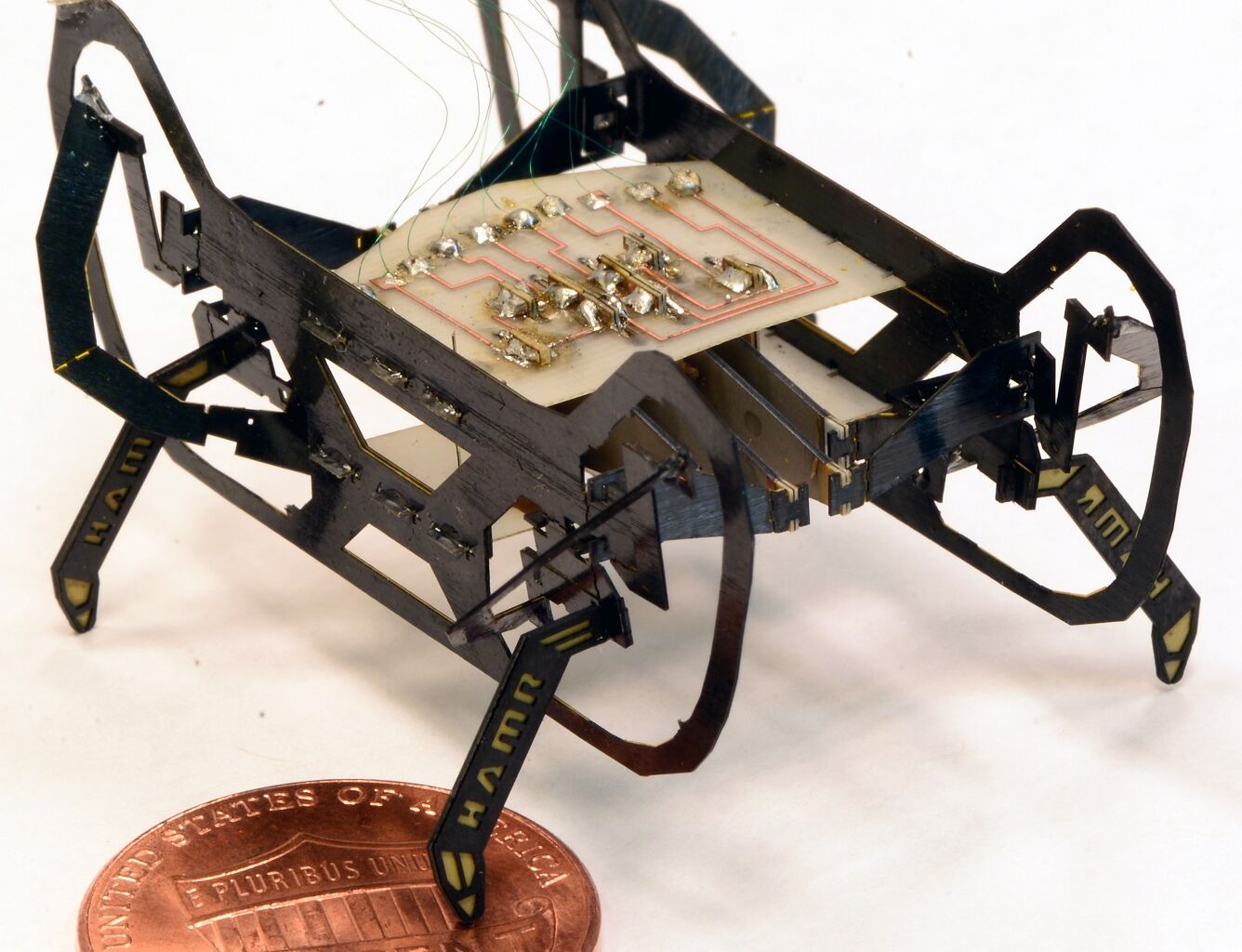
È ancora una volta la natura a fornire l’ispirazione per la creazione di un innovativo robot. Al mondo degli insetti, nello specifico all’ordine degli scarafaggi hanno infatti rivolto le loro attenzioni gli scienziati della John A. Paulson School of engineering and applied sciences (Seas) dell’Università di Harvard per sviluppare un piccolo robot dalle doti eccezionali. Hamr (Harvard’s ambulatory microrobot), il suo nome, è infatti in grado, proprio come uno scarafaggio, di muoversi velocemente sulla terra ferma, ma anche di correre sulla superficie dell’acqua e di immergersi e muoversi sott’acqua per tutto il tempo necessario, cambiare direzione bruscamente e, in più, di trasportare carichi.
Un piccolo gioiello tecnologico che testimonia dell’evoluzione della scienza robotica, sempre più in grado di creare robot di dimensioni sempre più piccole, ma al tempo stesso in grado di assolvere a funzioni complesse e capaci di competere per quanto riguarda alcune capacità con le loro controparti biologiche. Nel caso specifico, lo scarafaggio, insetto di terra ma in grado di sopravvivere anche per diversi minuti sott’acqua. Robot preziosi sia per lo studio degli animali che li hanno ispirati sia per i lavori ai quali saranno destinati, quali le attività di ricerca e soccorso, l’esplorazione di ambienti acquatici e le ispezioni di infrastrutture.
Capacità motorie eccezionali
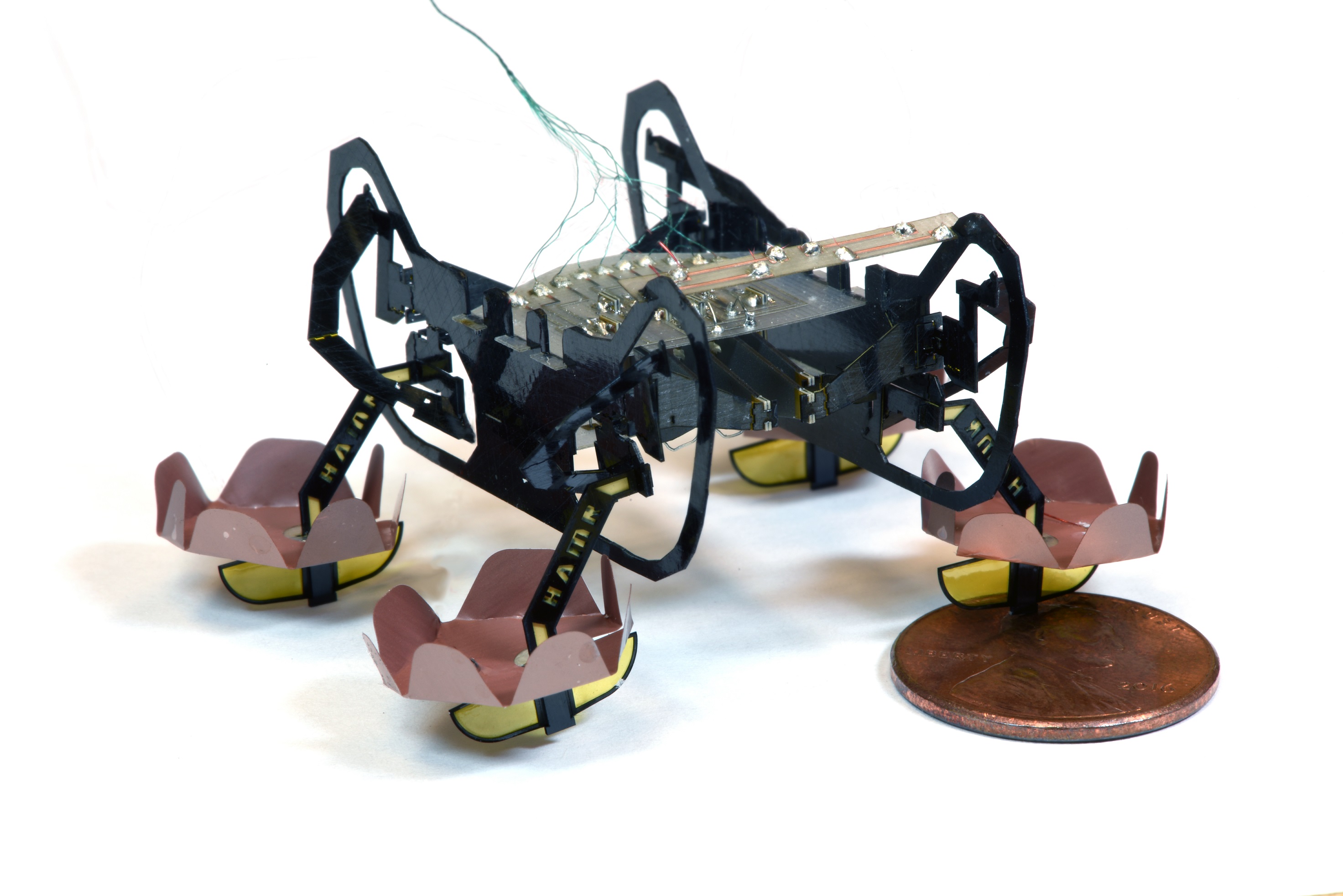
Le eccezionali capacità motorie di Hamr, in particolare quella di muoversi indifferentemente su una superficie solida, liquida e di immergersi e nuotare sott’acqua, è dovuta alle parti terminali, dei speciali “poggiapiedi”, delle sue 4 zampette multifunzione. Tali parti sfruttano la tensione superficiale e la galleggiabilità indotta da questa per far muovere il robot sulla superficie dell’acqua senza farlo affondare. Quando il robot invece deve immergersi, possono però applicare una piccola tensione elettrica in modo da rompere il “pavimento” costituito dalla superficie dell’acqua. Un processo, quest’ultimo, chiamato elettrowetting e che in pratica consiste nella riduzione dell’angolo di contatto tra un oggetto e la superficie liquida sotto l’impulso di una tensione applicata, cambiamento dell’angolo che consente all’oggetto di rompere più facilmente la superficie e penetrare all’interno della massa liquida. Eccolo in questo video
Piccoli robot grandi prestazioni
Spostarsi sulla superficie dell’acqua consente al piccolo robot, che pesa solo 1,65 grammi e può trasportare un carico utile di 1,44 senza affondare, oltre che di muoversi in un ambiente liquido, di superare anche eventuali ostacoli sommersi e di spostarsi più velocemente. Inoltre, altra peculiarità del piccolo robot è di utilizzare sott’acqua la stessa andatura che utilizza sulla terraferma, avendo così una grande mobilità.

Le sue dimensioni sono fondamentali per garantirgli tali prestazioni. «Se il robot fosse molto più grande, sarebbe difficile per lui mantenersi sulla superficie dell’acqua sfruttandone la tensione superficiale, mentre se fosse più piccolo non potrebbe generare una forza abbastanza grande per romperla e immergersi», spiega Neel Doshi, ricercatore presso la Seas e autore con il collega Kevin Chen dello studio pubblicato su Nature Communications, che illustra la ricerca condotta su Hamr. Ricerca che ha avuto il grande merito di dimostrare come la microrobotica possa sfruttare la fisica su piccola scala, in questo caso la tensione superficiale, per eseguire funzioni e capacità che sono impegnative per i robot più grandi.
Opportunità e sfide della microrobotica
«Questo robot illustra bene alcune delle sfide e opportunità offerte dai robot di piccola scala – ha spiegato in proposito Robert Wood, docente di Ingegneria e scienze applicate alla Seas e a capo del gruppo di ricerca -. La riduzione delle dimensioni garantisce una maggiore mobilità, quale appunto la capacità di camminare sull’acqua, ma porta anche nuove sfide, in quanto aspetti che diamo per scontati su scale più grandi possono rappresentare ostacoli impervi alla dimensione di un insetto».
Il riferimento è allo sforzo che il robot deve compiere per tornare a galla al termine delle sue immersioni. La forza della tensione superficiale dell’acqua è infatti pari al doppio del peso del microrobot e quindi lo spinge verso il basso, mentre la coppia indotta dalle sue zampe genera un notevole aumento di attrito sugli arti posteriori.
Per superare il problema i ricercatori hanno irrigidito la trasmissione del robot e installato dei cuscinetti morbidi sulle zampe anteriori che ne aumentano la capacità di carico utile e aiutano a ridistribuire l’attrito durante l’emersione, che avviene come un’arrampicata, cioè come se il robot, inclinandosi leggermente, stesse scalando una rampa di modesta pendenza. Sistema che gli scienziati vogliono migliorare, ad esempio incorporando nelle zampe sistemi adesivi ispirati a quelli del geco o meccanismi di salto impulsivo.