In natura esistono numerosi esempi di animali in grado di muoversi per terra, camminando, e al tempo stesso di spiccare il volo. Basta pensare agli uccelli o a diversi tipi di insetti. Una duplice capacità che se fosse acquisita anche dalle macchine aiuterebbe a risolvere un bel po’ di problemi: tra tutti, ad esempio, rilevare i danni e cercare e prestare soccorso alle vittime in caso di incidenti, o di disastri naturali, anche prelevando le persone dal luogo per metterle in salvo. Il problema con le macchine è che se eccellono in un tipo di trasporto presentano grandi lacune in un altro. Così i droni fatti per volare sono veloci e agili a muoversi nell’aria, ma generalmente hanno ancora un’autonomia troppo limitata per viaggiare su lunghe distanze. Da parte loro i droni terrestri hanno una buona efficienza energetica, ma risultano più lenti e meno agili.
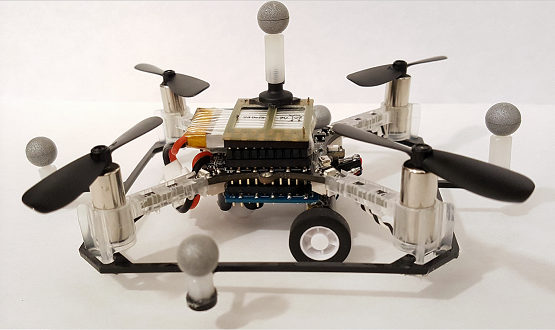
A cercare la giusta sintesi tra le due funzionalità è un gruppo di ricercatori del Laboratorio di informatica e di intelligenza artificiale (Csail) del Massachussets Institute of Technology (Mit), guidato da Brandon Araki, che sta mettendo a punto droni che possano muoversi sulla superficie terrestre, ma anche di spiccare il volo all’occorrenza. Un progetto che comincia pian piano a prendere corpo, come mostrato dai ricercatori alla Conferenza internazionale di robotica e automazione (Icra) di Singapore pochi giorni fa, dove hanno presentato i prototipi dei nuovi droni multifunzione. Otto quadricotteri dotati di due piccoli motori con ruote nella parte inferiore della struttura e capaci di compiere bene entrambe le missioni.
L’algoritmo di pianificazione del percorso
Il progetto si basa su precedenti lavori di Araki, in particolare quelli che hanno portato allo sviluppo di robot scimmia, capaci di arrampicarsi, camminare, volare e aggirare ostacoli, ma non di spostarsi autonomamente senza scontrarsi fra loro.
Problema che il team di ricerca ha risolto sviluppando diversi algoritmi di “pianificazione del percorso” volti a garantire che i droni non collidano tra di loro quando si muovono.
Il team ha condotto i primi test in una “città-modello”, realizzata con case fatte di scatole di cartone e strade fatte di strisce di tessuto: i risultati sono stati ottimi, ogni drone è riuscito a completare il suo percorso senza entrare in collisione con i suoi simili. Nelle simulazioni effettuate, hanno mostrato come droni con un simile assetto possano compiere spostamenti fino a 90 metri in volo e fino a 252 metri sul suolo. Ecco un video
Un primo passo verso le auto volanti
Un risultato del quale i ricercatori sono molto soddisfatti. È vero infatti che l’aggiunta dei componenti per gli spostamenti a terra ha comportato, a causa dell’incremento di peso, una riduzione della durata della batteria, riducendo di conseguenza la distanza massima che il drone può percorrere in volo (circa il 14%). Tuttavia questa perdita è ampiamente compensata dall’acquisizione della nuova funzionalità e dall’efficienza degli spostamenti a terra.
«Soprattutto i risultati suggeriscono che è possibile un altro approccio alla creazione di vetture di volo sicure ed efficaci, che non sia semplicemente “mettere ali alle automobili”, ma anche trovare soluzioni per consentire ai droni di muoversi su terra – ha spiegato Daniela Rus, direttrice del Csail – Mentre cominciamo a sviluppare algoritmi di pianificazione e controllo per le vetture volanti, siamo incoraggiati dalla possibilità di creare robot con queste capacità su piccola scala». Un primo ma importante gradino nella scala, ricca ancora di grandi sfide, che porterà alla realizzazione di automobili volanti davvero capaci di trasportare esseri umani in totale sicurezza.