 U-CAT al lavoro sul fondo di un lago estone
U-CAT al lavoro sul fondo di un lago estone
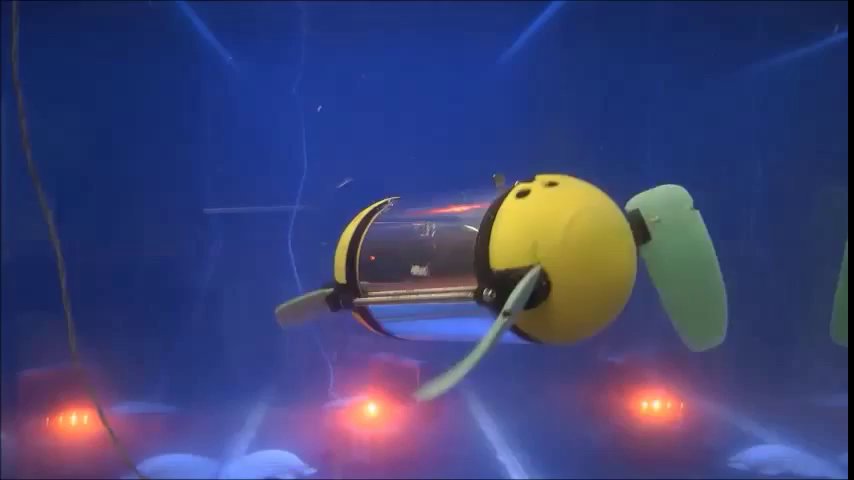
Una prigione sovietica a Rummu, in Estonia, abbandonata e allagata insieme con la vicina cava nel 1990, sta riemergendo dalle sabbie del lago con i suoi edifici e i suoi macchinari. Questo luogo è divenuto un popolare punto di immersione e anche un ottimo posto per testare U-CAT. Afferma Maarja Kruusmaa, professoressa di Biorobotica, Center for Biorobotics, Tallinn University of Technology: “Deve raggiungere luoghi confinati, fare delle riprese video e tornare. Spesso, c‘è molto poco spazio, mentre questo robot ha ampio margine di manovra e puó tornare indietro.”
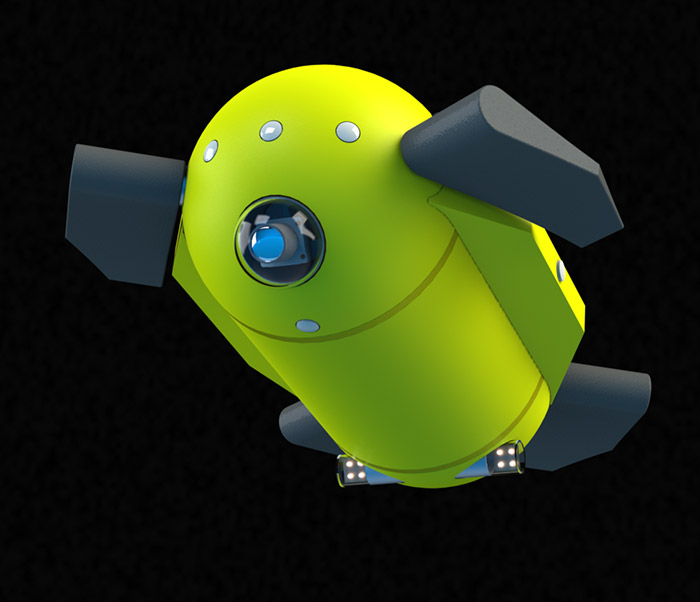
U-CAT funziona senza telecomando e segue il suo programma in modo autonomo (i suoi sensori prevengono collisioni sott’acqua). I progettisti hanno utilizzato un approccio biomimetico per la sua realizzazione: per muoversi in modo efficiente, emula animali del mare come tartarughe o pesci.
Questo semplice dispositivo rappresenta una conquista per gli scienziati, perchè aiuta a studiare il patrimonio sottomarino senza molti rischi. Benedetto Allotta, professore di Robotica, Università di Firenze e coordinatore del progetto ARROWS, ha affermato a riguardo: “Quando si fanno delle indagini archeologiche è molto importante sapere a quale punto preciso si riferisce una certa foto o un certo video. Non essendoci la trasmissione dei segnali radio sott’acqua, è necessario utilizzare la comunicazione acustica. La comunicazione acustica peró non è molto affidabile, è lenta e ci sono tutta una serie di problematiche tecniche sulla comunicazione e la cooperazione dei robot, che noi abbiamo affrontato durante il progetto”.