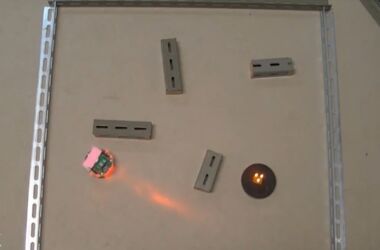
Un gruppo di ricercatori della Princeton University ha testato un nuovo approccio di apprendimento automatico per garantire la sicurezza e il successo dei droni in contesti non familiari. Gli esperimenti includevano la programmazione di un piccolo UAV, prodotto dalla Parrot, per evitare gli ostacoli durante il volo lungo un corridoio lungo 18 metri.
L’algoritmo che controlla il drone è stato addestrato su un migliaio di percorsi simulati carichi di ostacoli: 9 volte su 10 il Parrot Swing – una combinazione di quadricottero e aeroplano ad ala fissa – è riuscito a evitare gli ostacoli!
Poiché gli ingegneri si rivolgono sempre più a metodi di apprendimento automatico per sviluppare robot adattabili, il nuovo lavoro dei ricercatori della Princeton University fa progressi su tali garanzie per i droni in contesti con diversi tipi di ostacoli e vincoli.
“Negli ultimi dieci anni circa, si sono registrati interessanti progressi nell’apprendimento automatico nel contesto della robotica, principalmente perché questa tecnologia ti consente di gestire input sensoriali ricchi, come quelli della telecamera di un robot, e di mapparli rispetto alle azioni programmate”, ha dichiarato al sito specializzato spacedaily.com Anirudha Majumdar, assistente professore di ingegneria meccanica e aerospaziale a Princeton.
L’Intelligent Robot Motion Lab di Majumdar ha affrontato la sfida ampliando la suite di strumenti disponibili per l’addestramento delle politiche di controllo dei robot e quantificando il probabile successo e la sicurezza dei robot che operano in nuovi ambienti.
In tre nuovi documenti, inoltre, i ricercatori si sono adattati quadri di apprendimento automatico da altre arene al campo della locomozione robotica e manipolazione. Si sono rivolti alla teoria della generalizzazione, che viene utilizzata in contesti che mappano un singolo input su un singolo output, come il tagging automatico delle immagini.